השיעור פותח בשני תיאורים מתמטיים שקולים של מדידות:
מדידות כלליות ניתן לתאר באמצעות אוספים של מטריצות, אחת לכל תוצאת מדידה, בצורה שמכלילה את התיאור של מדידות פרויקטיביות.
מדידות כלליות ניתן לתאר כערוצים שפלטם הוא תמיד מצבים קלאסיים (מיוצגים על ידי מטריצות צפיפות אלכסוניות).
נגביל את עצמנו למדידות בעלות מספר סופי של תוצאות אפשריות.
אמנם אפשר להגדיר מדידות עם מספר אינסופי של תוצאות, אך הן פחות נפוצות בהקשר של חישוב ועיבוד מידע, וגם דורשות מתמטיקה נוספת (תורת המידה) כדי לנסחן כראוי.
תחילה נתמקד במדידות הרסניות, שבהן פלט המדידה הוא תוצאת המדידה הקלאסית בלבד — ללא ציון המצב הקוונטי של המערכת לאחר המדידה.
באופן אינטואיטיבי, אפשר לדמיין שמדידה כזו הורסת את המערכת הקוונטית עצמה, או שהמערכת מושלכת מיד לאחר ביצוע המדידה.
בהמשך השיעור נרחיב את ההסתכלות ונדון במדידות לא הרסניות, שבהן יש גם תוצאת מדידה קלאסית וגם מצב קוונטי של המערכת לאחר המדידה.
נניח ש-X היא מערכת שיש למדוד, ונניח לפשטות שקבוצת המצבים הקלאסיים של X היא {0,…,n−1} עבור מספר שלם חיובי כלשהו n, כך שמטריצות הצפיפות המייצגות מצבים קוונטיים של X הן מטריצות n×n.
בפועל לא נצטרך להתייחס הרבה למצבים הקלאסיים של X, אך יהיה נוח להתייחס ל-n, מספר המצבים הקלאסיים של X.
נניח גם שהתוצאות האפשריות של המדידה הן המספרים השלמים 0,…,m−1 עבור מספר שלם חיובי כלשהו m.
שים לב שאנחנו משתמשים בשמות אלה רק לנוחות;
ניתן להכליל בקלות את כל הנאמר להלן לקבוצות סופיות אחרות של מצבים קלאסיים ותוצאות מדידה, עם שמות אחרים לפי הרצון.
נזכיר כי מדידה פרויקטיבית מתוארת על ידי אוסף של מטריצות הטלה שסכומן הוא מטריצת הזהות.
בסימנים,
{Π0,…,Πm−1}
מתאר מדידה פרויקטיבית של X אם כל Πa היא מטריצת הטלה n×n והתנאי הבא מתקיים.
Π0+⋯+Πm−1=IX
כאשר מדידה כזו מבוצעת על מערכת X במצב המתואר על ידי וקטור מצב קוונטי ∣ψ⟩, כל תוצאה a מתקבלת עם הסתברות השווה ל-∥Πa∣ψ⟩∥2.
כמו כן, המצב לאחר המדידה של X מתקבל על ידי נירמול הוקטור Πa∣ψ⟩, אך אנחנו מתעלמים מהמצב שלאחר המדידה בשלב זה.
אם מצב X מתואר על ידי מטריצת צפיפות ρ ולא על ידי וקטור מצב קוונטי ∣ψ⟩, אפשר לבטא לחלופין את ההסתברות לקבל את התוצאה a כ-Tr(Πaρ).
תיאור מתמטי של מדידות כלליות מתקבל על ידי הרפיית הגדרת המדידות הפרויקטיביות.
ספציפית, אנחנו מאפשרים שהמטריצות באוסף המתאר את המדידה יהיו מטריצות חיוביות למחצה כלשהן ולא בהכרח הטלות.
(הטלות הן תמיד חיוביות למחצה; אפשר להגדירן לחלופין כמטריצות חיוביות למחצה שערכיהן העצמיים הם כולם 0 או 1.)
בפרט, מדידה כללית של מערכת X עם תוצאות 0,…,m−1 מוגדרת על ידי אוסף של מטריצות חיוביות למחצה {P0,…,Pm−1} שהשורות והעמודות שלהן מתאימות למצבים הקלאסיים של X ושמקיימות את התנאי
P0+⋯+Pm−1=IX.
אם מדידים את המערכת X כאשר היא במצב המתואר על ידי מטריצת הצפיפות ρ, אז כל תוצאה
a∈{0,…,m−1} מופיעה עם הסתברות Tr(Paρ).
כפי שנדרש בטבעיות, וקטור ההסתברויות של התוצאות
(Tr(P0ρ),…,Tr(Pm−1ρ))
של מדידה כללית מהווה תמיד וקטור הסתברות, לכל בחירה של מטריצת צפיפות ρ.
שתי ההבחנות הבאות מבססות עובדה זו.
כל ערך Tr(Paρ) חייב להיות אי-שלילי, בשל העובדה שהעקבה של מכפלת שתי מטריצות חיוביות למחצה היא תמיד אי-שלילית:
Q,R≥0⇒Tr(QR)≥0.
דרך אחת להוכיח עובדה זו היא להשתמש בפירוק הספקטרלי של Q ו-R יחד עם התכונה המחזורית של העקבה, כדי לבטא את העקבה של המכפלה QR כסכום של מספרים ממשיים אי-שליליים, שחייב להיות אי-שלילי.
התנאי P0+⋯+Pm−1=IX יחד עם הלינאריות של העקבה מבטיחים שסכום ההסתברויות הוא 1.
שתיהן מטריצות חיוביות למחצה: הן הרמיטיות, ובשני המקרים הערכים העצמיים הם 1/2±5/6, שהם שניהם חיוביים.
כמו כן P0+P1=I, ולכן {P0,P1} מתאר מדידה.
אם מצב X מתואר על ידי מטריצת צפיפות ρ ואנחנו מבצעים מדידה זו, אז ההסתברות לקבל את התוצאה 0 היא Tr(P0ρ) וההסתברות לקבל את התוצאה 1 היא
Tr(P1ρ).
לדוגמה, אם ρ=∣+⟩⟨+∣ אז ההסתברויות לשתי התוצאות 0 ו-1 הן כדלקמן.
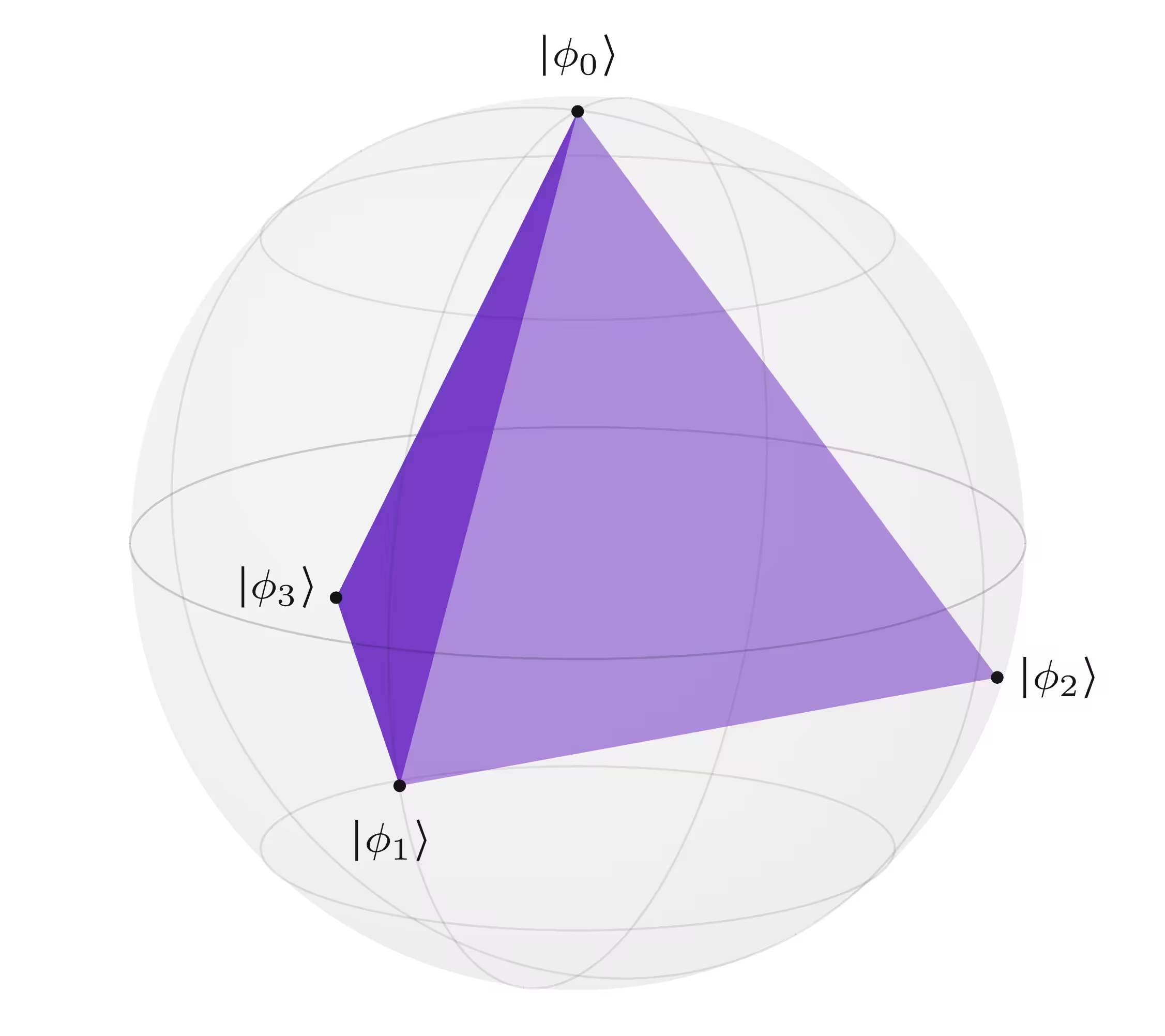
ארבעת המצבים הללו פרוסים באופן מושלם על כדור בלוך, כל אחד מהם שווה מרחק משלושת האחרים והזוויות בין כל זוג מצבים זהות תמיד.
כעת נגדיר מדידה {P0,P1,P2,P3} של qubit על ידי הצבת Pa כדלקמן לכל a=0,…,3.
Pa=2∣ϕa⟩⟨ϕa∣
ניתן לאמת שזו מדידה תקפה כדלקמן.
כל Pa חיובית למחצה באופן ברור, שכן היא מצב טהור חלקי מחצית.
כלומר, כל אחת מהן היא מטריצה הרמיטית עם ערך עצמי אחד השווה ל-1/2 וכל שאר הערכים העצמיים אפס.
סכום המטריצות הללו הוא מטריצת הזהות: P0+P1+P2+P3=I.
ביטוי המטריצות הללו כקומבינציות לינאריות של מטריצות פאולי הופך את האימות לפשוט.
דרך שנייה לתאר מדידות במונחים מתמטיים היא כערוצים.
מידע קלאסי ניתן לראות כמקרה פרטי של מידע קוונטי, במידה שאפשר לזהות מצבים הסתברותיים עם מטריצות צפיפות אלכסוניות.
לכן, במונחים תפעוליים, אפשר לחשוב על מדידות כערוצים שהקלטים שלהם הם מטריצות המתארות מצבים של המערכת הנמדדת, והפלטים שלהם הם מטריצות צפיפות אלכסוניות המתארות את התפלגות תוצאות המדידה.
נראה בקרוב שכל ערוץ בעל תכונה זו ניתן תמיד לכתיבה בצורה פשוטה וקנונית הקשורה ישירות לתיאור המדידות כאוספים של מטריצות חיוביות למחצה.
ולהפך, בהינתן מדידה שרירותית כאוסף של מטריצות, תמיד קיים ערוץ תקף בעל תכונת הפלט האלכסוני המתאר את המדידה הנתונה כפי שמוצע בפסקה הקודמת.
מצירוף התצפיות הללו, מוצאים שני התיאורים של מדידות כלליות שקולים.
לפני שנמשיך, בוא נהיה מדויקים יותר לגבי המדידה, כיצד אנחנו רואים אותה כערוץ, ואילו הנחות אנחנו מניחים לגביה.
כמו קודם, נניח ש-X הוא המערכת הנמדדת, ושתוצאות המדידה האפשריות הן המספרים השלמים 0,…,m−1 עבור מספר שלם חיובי כלשהו m.
נגדיר את Y כמערכת שמאחסנת את תוצאות המדידה, כך שקבוצת המצבים הקלאסיים שלה היא {0,…,m−1}, ונייצג את המדידה כערוץ בשם Φ מ-X ל-Y.
ההנחה שלנו היא ש-Y הוא קלאסי — כלומר, לא משנה באיזה מצב נתחיל עבור X, המצב של Y שנקבל מיוצג על ידי מטריצת צפיפות אלכסונית.
ניתן לבטא במונחים מתמטיים שהפלט של Φ הוא תמיד אלכסוני בדרך הבאה.
ראשית נגדיר את ערוץ השחיקה המוחלטת Δm על Y.
Δm(σ)=a=0∑m−1⟨a∣σ∣a⟩∣a⟩⟨a∣
ערוץ זה דומה לערוץ השחיקה המוחלטת של qubit Δ מהשיעור הקודם.
כמיפוי לינארי, הוא מאפס את כל הכניסות מחוץ לאלכסון של מטריצת קלט ומשאיר את האלכסון ללא שינוי.
ועכשיו, דרך פשוטה לבטא שמטריצת צפיפות נתונה σ היא אלכסונית היא על ידי המשוואה
σ=Δm(σ).
במילים, אפסום כל הכניסות מחוץ לאלכסון של מטריצת צפיפות אינו משפיע אם ורק אם הכניסות מחוץ לאלכסון היו כולן אפס מלכתחילה.
הערוץ Φ מקיים אפוא את ההנחה שלנו — ש-Y הוא קלאסי — אם ורק אם
לפיכך, עבור אותן מטריצות P0,…,Pm−1 ניתן לבטא את הערוץ Φ כדלקמן.
Φ(ρ)=a=0∑m−1Tr(Paρ)∣a⟩⟨a∣
ביטוי זה עקבי עם תיאורנו של מדידות כלליות במונחי מטריצות, שכן אנחנו רואים כל תוצאת מדידה מופיעה עם ההסתברות Tr(Paρ).
עכשיו בוא נבחן שתי התכונות הנדרשות מאוסף המטריצות {P0,…,Pm−1} כדי לתאר מדידה כללית אכן מתקיימות.
התכונה הראשונה היא שכולן מטריצות חיוביות למחצה.
דרך אחת לראות זאת היא לשים לב שעבור כל וקטור ∣ψ⟩ בעל כניסות בהתאמה למצב הקלאסי של X מתקיים
הטרנספוז של כל Pa מוכנס עבור השוויון השלישי מכיוון ש-
⟨c∣Pa∣b⟩=⟨b∣PaT∣c⟩.
זה מאפשר להופיע לביטויים ∣b⟩⟨b∣ ו-∣c⟩⟨c∣, המצטמצמים למטריצת הזהות עם סיכום על b ו-c בהתאמה.
מהנחה ש-P0,…,Pm−1 הן חיוביות למחצה, כך גם P0T,…,Pm−1T.
בפרט, טרנספוז של מטריצה הרמיטית מניב מטריצה הרמיטית נוספת, וערכי העצמי של כל מטריצה ריבועית והטרנספוז שלה תמיד זהים.
מכאן נובע ש-J(Φ) היא חיובית למחצה.
ביצוע עקבה על מערכת הפלט Y (שהיא המערכת מצד ימין) מניב
נניח שיש לנו מספר מערכות הנמצאות יחד במצב קוונטי, ומדידה כללית מבוצעת על אחת המערכות.
פעולה זו מניבה אחת מתוצאות המדידה, שנבחרת באקראי לפי הסתברויות הנקבעות על ידי המדידה ומצב המערכת לפני המדידה.
המצב שנוצר של המערכות הנותרות יהיה אז, באופן כללי, תלוי באיזו תוצאת מדידה התקבלה.
בוא נבחן כיצד זה עובד עבור זוג מערכות (X,Z) כאשר המערכת X נמדדת.
(אנחנו קוראים למערכת מצד ימין Z מכיוון שנלקח Y להיות מערכת המייצגת את הפלט הקלאסי של המדידה כשאנו רואים אותה כערוץ.)
אז ניתן להכליל בקלות למצב בו הסדר של המערכות הפוך וגם לשלוש מערכות ויותר.
נניח שמצב (X,Z) לפני המדידה מתואר על ידי מטריצת צפיפות ρ, שניתן לכתוב כדלקמן.
ρ=b,c=0∑n−1∣b⟩⟨c∣⊗ρb,c
בביטוי זה אנחנו מניחים שהמצבים הקלאסיים של X הם 0,…,n−1.
נניח שהמדידה עצמה מתוארת על ידי אוסף המטריצות
{P0,…,Pm−1}.
מדידה זו ניתן לתאר לחלופין כערוץ Φ מ-X ל-Y, כאשר Y היא מערכת חדשה בעלת קבוצת מצבים קלאסיים {0,…,m−1}.
ספציפית, פעולת ערוץ זה ניתנת לביטוי כדלקמן.
אנחנו בוחנים מדידה של המערכת X, כך שההסתברויות להתקבלות תוצאות שונות יכולות להיות תלויות רק ב-ρX, המצב המצומצם של X.
בפרט, ההסתברות לכל תוצאה a∈{0,…,m−1} ניתנת לביטוי בשלוש דרכים שקולות.
Tr(PaρX)=Tr(PaTrZ(ρ))=Tr((Pa⊗IZ)ρ)
הביטוי הראשון מייצג באופן טבעי את ההסתברות לקבלת התוצאה a בהתבסס על מה שכבר ידוע לנו על מדידות של מערכת יחידה.
לקבל את הביטוי השני אנחנו פשוט משתמשים בהגדרה ρX=TrZ(ρ).
לקבל את הביטוי השלישי דורש יותר מחשבה — ולומדים מוזמנים לשכנע את עצמם שהוא נכון.
הנה רמז: השקילות בין הביטוי השני לשלישי אינה תלויה ב-ρ כמטריצת צפיפות או בכל Pa כחיובית למחצה. נסו להוכיח זאת תחילה עבור מכפלות טנסוריות מהצורה ρ=M⊗N ואז הסיקו שזה חייב להיות נכון בכלליות על ידי לינאריות.
אמנם השקילות של הביטוי הראשון והשלישי במשוואה הקודמת אינה מיידית, אבל יש בה היגיון.
מתוך מדידה על X, אנחנו למעשה מגדירים מדידה של (X,Z), שבה פשוט זורקים את Z ומודדים את X.
כמו כל המדידות, מדידה חדשה זו ניתנת לתיאור באמצעות אוסף מטריצות, ואין זה מפתיע שמדידה זו מתוארת על ידי האוסף
אם אנחנו רוצים לקבוע לא רק את ההסתברויות לתוצאות השונות אלא גם את המצב הנוצר של Z המותנה בכל תוצאת מדידה, ניתן לפנות לתיאור הערוצי של המדידה.
בפרט, בוא נבחן את המצב שנקבל כשמפעילים את Φ על X ולא עושים דבר ל-Z.
כפי שראינו בשיעור מטריצות צפיפות.
עבור כל תוצאת מדידה a∈{0,…,m−1}, מתקיים עם הסתברות
p(a)=Tr((Pa⊗IZ)ρ)
ש-Y נמצא במצב הקלאסי ∣a⟩⟨a∣ ו-Z נמצא במצב
σa=Tr((Pa⊗IZ)ρ)TrX((Pa⊗IZ)ρ).(2)
כלומר, זו מטריצת הצפיפות שמקבלים על ידי נרמול
TrX((Pa⊗IZ)ρ)
בחלוקה בעקבה שלו.
(פורמלית, המצב σa מוגדר רק כאשר ההסתברות p(a) אינה אפס;
כאשר p(a)=0 מצב זה אינו רלוונטי, שכן הוא מתייחס לאירוע דיסקרטי המתרחש בהסתברות אפס.)
באופן טבעי, הסתברויות התוצאה עקביות עם התצפיות הקודמות שלנו.
לסיכום, כך קורה כשמדידה {P0,…,Pm−1} מבוצעת על X כאשר (X,Z) נמצא במצב ρ.
כל תוצאה a מופיעה עם הסתברות p(a)=Tr((Pa⊗IZ)ρ).
בהינתן קבלת התוצאה a, מצב Z מיוצג אז על ידי מטריצת הצפיפות σa המוצגת במשוואה (2), המתקבלת על ידי נרמול TrX((Pa⊗IZ)ρ).
ניתן להתאים תיאור זה למצבים אחרים, כגון כאשר סדר המערכות הפוך או כשיש שלוש מערכות ויותר.
מבחינה קונצפטואלית זה ישיר, אם כי הכתיבה של הנוסחאות עלולה להיות מסורבלת.
באופן כללי, אם יש לנו r מערכות X1,…,Xr, מצב המערכת המורכבת (X1,…,Xr) הוא ρ, והמדידה {P0,…,Pm−1} מבוצעת על Xk, קורה הדבר הבא.
כל תוצאה a מופיעה עם הסתברות
p(a)=Tr((IX1⊗⋯⊗IXk−1⊗Pa⊗IXk+1⊗⋯⊗IXr)ρ).
בהינתן קבלת התוצאה a, מצב (X1,…,Xk−1,Xk+1,…,Xr) מיוצג אז על ידי מטריצת הצפיפות הבאה.